
$9,999.00
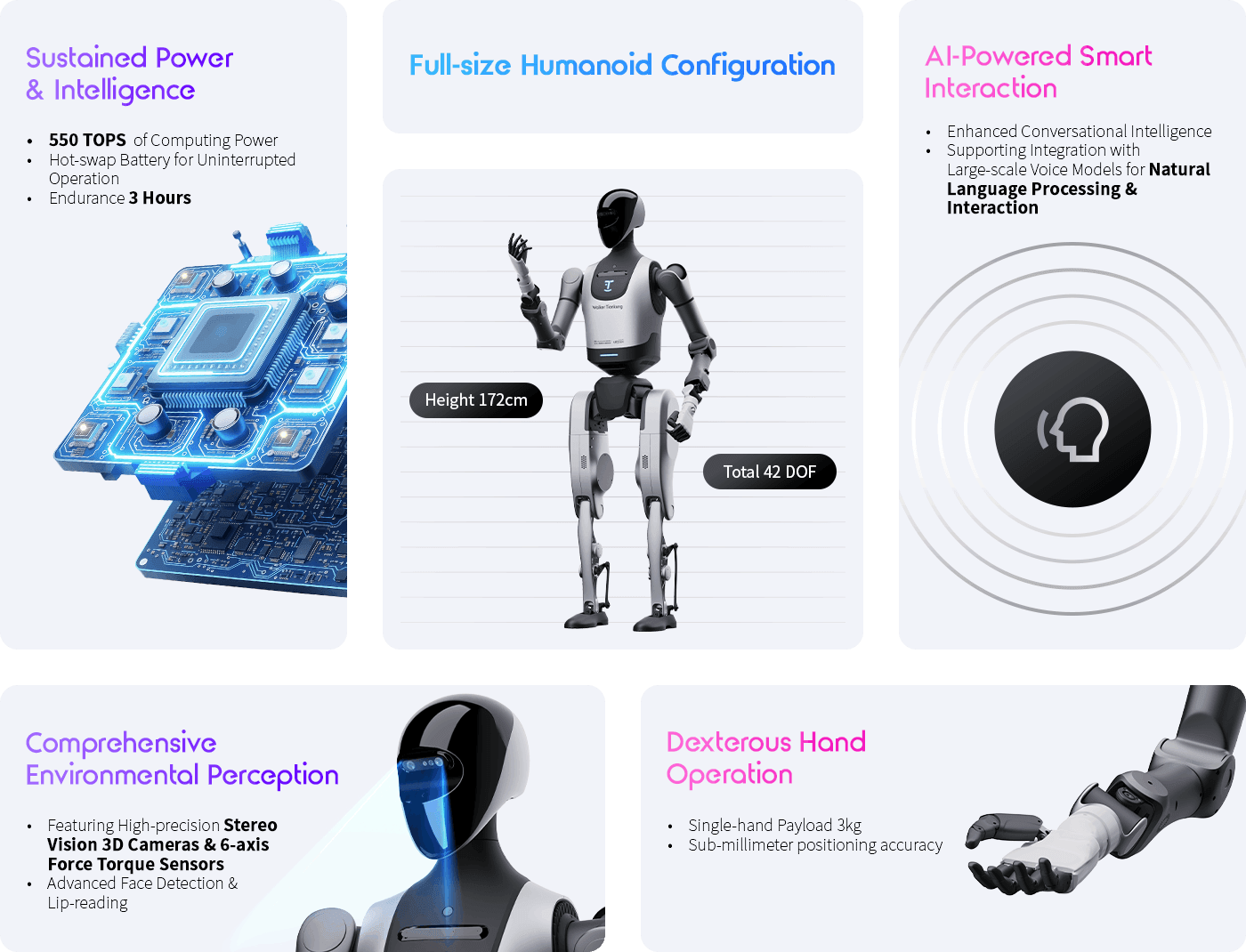
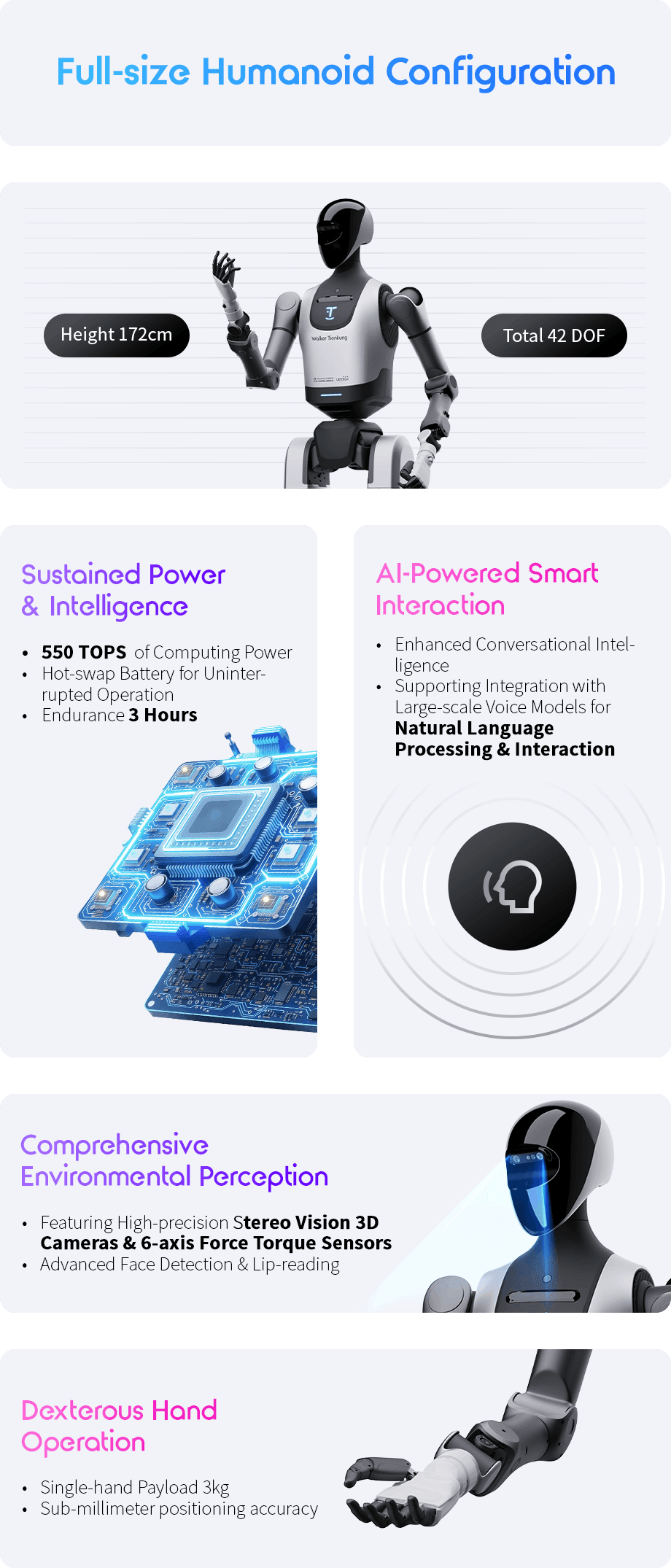
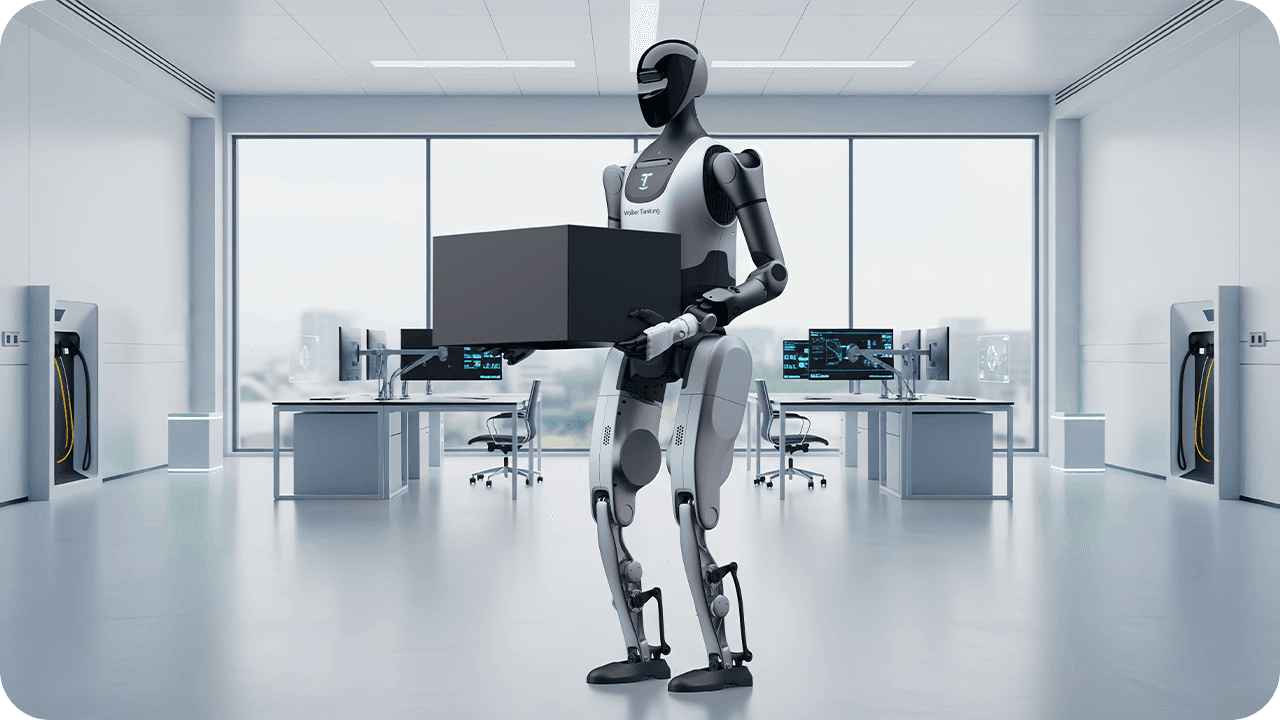
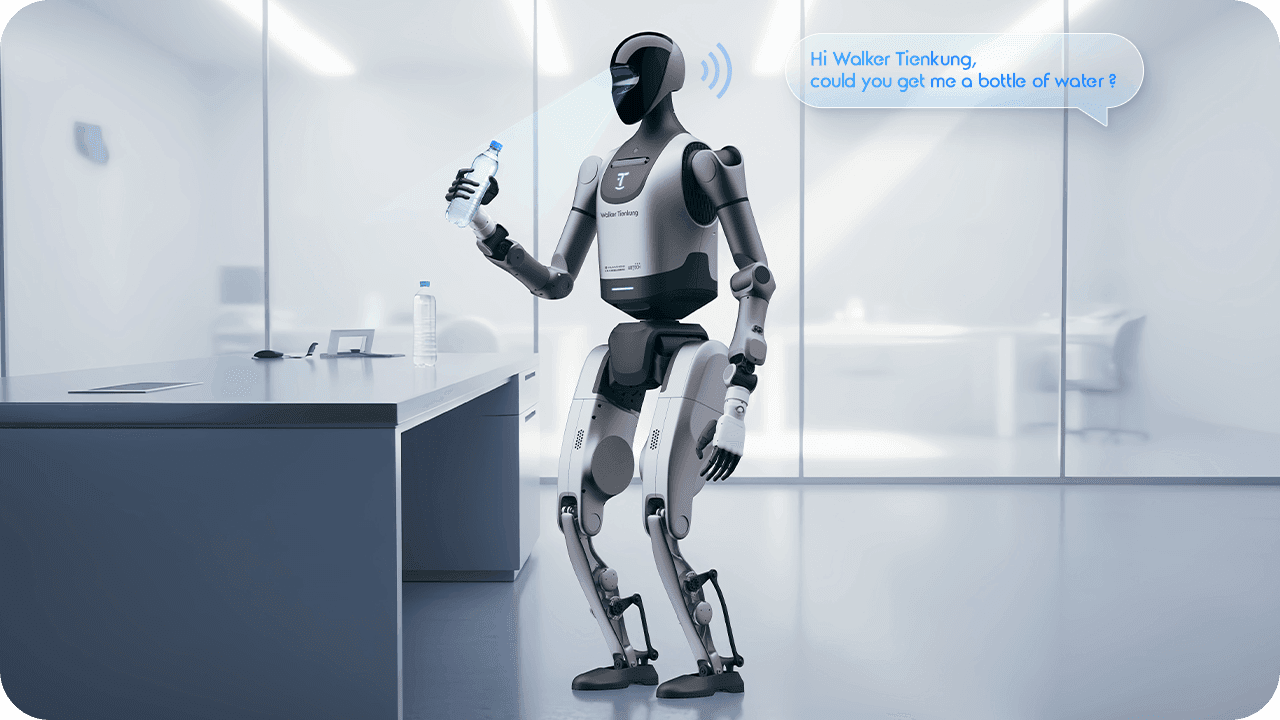
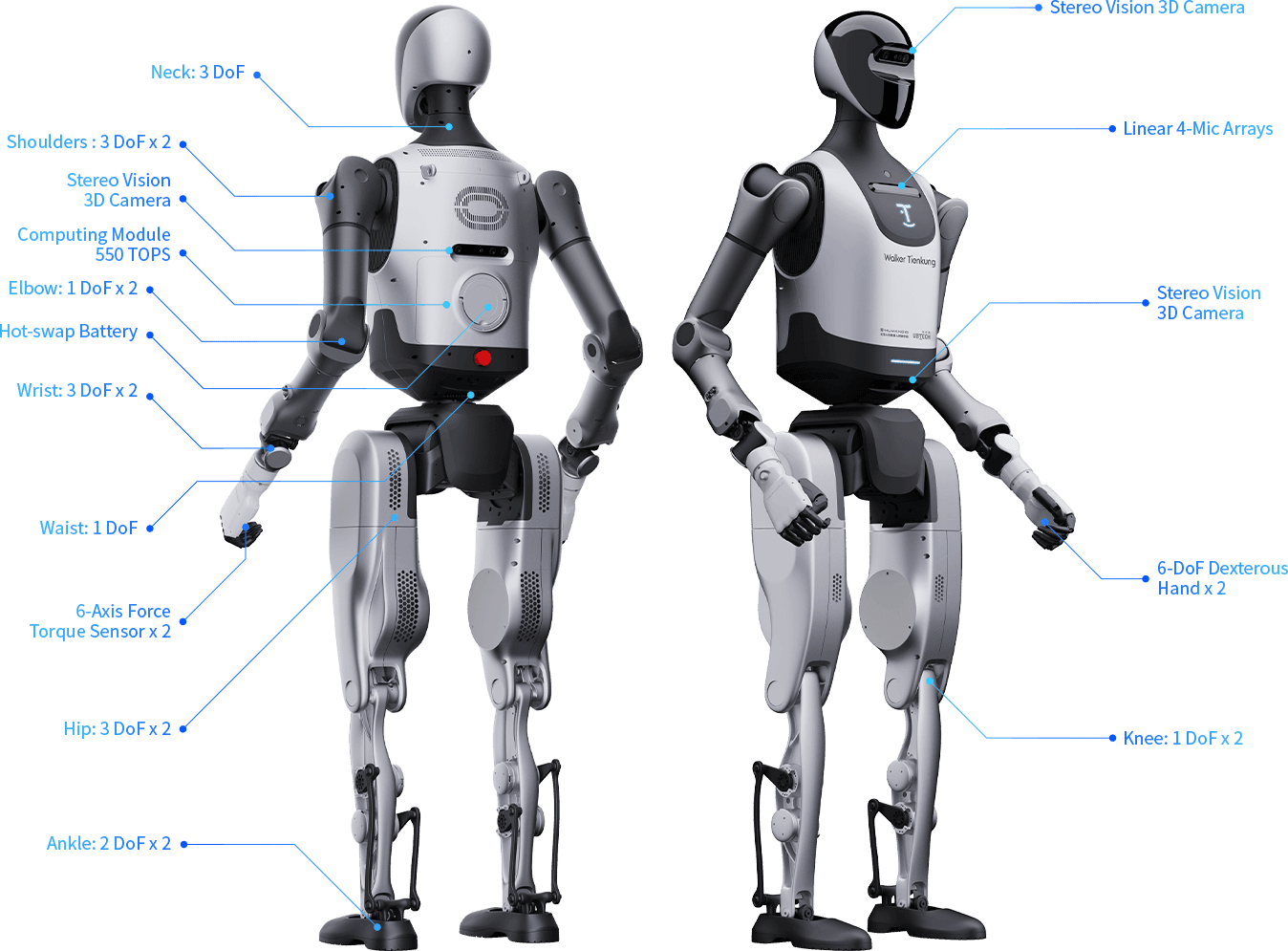
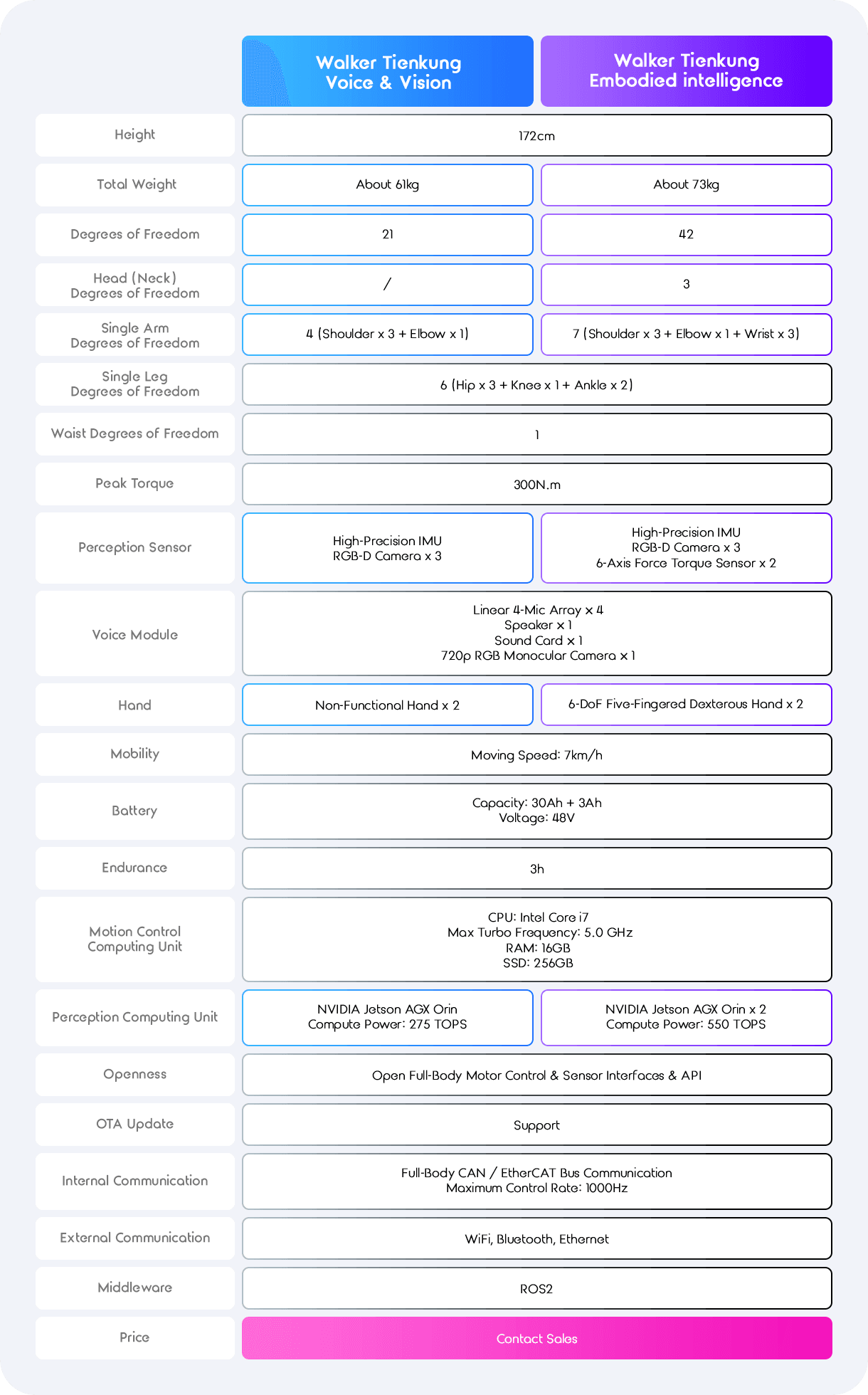
Walker Tienkung, Full-size Humanoid Robot
Designed for Academic Research, Education & Secondary Development
 Advanced Educational Humanoid ...
Advanced Educational Humanoid ...
$9,999.00
Encompasses Comprehensive Robotics-related Data
This website uses cookies to improve your experience.
By using this website you agree to our Privacy Policy.




